Because of the growth of artificial intelligence (AI) and
robots and their application to military matters, generals on the contemporary
battlefield are seeing a possible tactical and strategic revolution.
Unmanned aerial vehicles (UAVs), also known as drones, and
other robotic devices played a key role in the wars in Afghanistan (2001–) and
Iraq (2003–2011).
It is possible that future conflicts will be waged without
the participation of humans.
Without human control or guidance, autonomous robots will
fight in war on land, in the air, and beneath the water.
While this vision remains in the realm of science fiction,
battlefield AI and robotics raise a slew of practical, ethical, and legal
issues that military leaders, technologists, jurists, and philosophers must
address.
When many people think about AI and robotics on the
battlefield, the first image that springs to mind is "killer robots,"
armed machines that indiscriminately destroy everything in their path.
There are, however, a variety of applications for
battlefield AI that do not include killing.
In recent wars, the most notable application of such
technology has been peaceful in character.
UAVs are often employed for surveillance and reconnaissance.
Other robots, like as iRobot's PackBot (the same firm that
makes the vacuum-cleaning Roomba), are employed to locate and assess improvised
explosive devices (IEDs), making their safe disposal easier.
Robotic devices can navigate treacherous terrain, such as
Afghanistan's caves and mountain crags, as well as areas too dangerous for
humans, such as under a vehicle suspected of being rigged with an IED.
Unmanned Underwater Vehicles (UUVs) are also used to detect
mines underwater.
IEDs and explosives are so common on today's battlefields
that these robotic gadgets are priceless.
Another potential life-saving capacity of battlefield robots
that has yet to be realized is in the realm of medicine.
Robots can safely collect injured troops on the battlefield
in areas that are inaccessible to their human counterparts, without
jeopardizing their own lives.
Robots may also transport medical supplies and medications
to troops on the battlefield, as well as conduct basic first aid and other
emergency medical operations.
AI and robots have the greatest potential to change the
battlefield—whether on land, sea, or in the air—in the arena of deadly power.
The Aegis Combat System (ACS) is an example of an autonomous
system used by several militaries across the globe aboard destroyers and other
naval combat vessels.
Through radar and sonar, the system can detect approaching
threats, such as missiles from the surface or air, mines, or torpedoes from the
water.
The system is equipped with a powerful computer system and
can use its own munitions to eliminate identified threats.
Despite the fact that Aegis is activated and supervised
manually, it has the potential to operate autonomously in order to counter
threats faster than humans could.
In addition to partly automated systems like the ACS and
UAVs, completely autonomous military robots capable of making judgments and
acting on their own may be developed in the future.
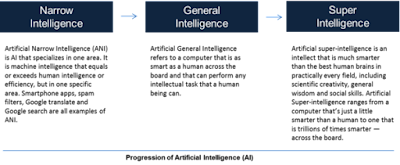
The most significant feature of AI-powered robotics is the
development of lethal autonomous weapons (LAWs), sometimes known as
"killer robots." On a sliding scale, robot autonomy exists.
At one extreme of the spectrum are robots that are designed
to operate autonomously, but only in reaction to a specific stimulus and in one
direction.
This degree of autonomy is shown by a mine that detonates
autonomously when stepped on.
Remotely operated machines, which are unmanned yet
controlled remotely by a person, are also available at the lowest end of the
range.
Semiautonomous systems occupy the midpoint of the spectrum.
These systems may be able to work without the assistance of
a person, but only to a limited extent.
A robot commanded to launch, go to a certain area, and then
return at a specific time is an example of such a system.
The machine does not make any "decisions" on its
own in this situation.
Semiautonomous devices may also be configured to accomplish
part of a task before waiting for further inputs before moving on to the next
step.
Full autonomy is the last step.
Fully autonomous robots are designed with a purpose and are
capable of achieving it entirely on their own.
This might include the capacity to use deadly force without
direct human guidance in warfare circumstances.
Robotic gadgets that are lethally equipped, AI-enhanced, and
totally autonomous have the ability to radically transform the current warfare.
Military ground troops made up of both humans and robots, or
entirely of robots with no humans, would expand armies.
Small, armed UAVs would not be constrained by the
requirement for human operators, and they might be assembled in massive swarms
to overwhelm bigger, but less mobile troops.
Such technological advancements will entail equally dramatic
shifts in tactics, strategy, and even the notion of combat.
This technology will become less expensive as it becomes
more widely accessible.
This might disturb the present military power balance.
Even minor governments, and maybe even non-state
organizations like terrorist groups, may be able to develop their own robotic
army.
Fully autonomous LAWs bring up a slew of practical, ethical,
and legal issues.
One of the most pressing practical considerations is safety.
A completely autonomous robot with deadly armament that
malfunctions might represent a major threat to everyone who comes in contact
with it.
Fully autonomous missiles might theoretically wander off
course and kill innocent people due to a mechanical failure.
Unpredictable technological faults and malfunctions may
occur in any kind of apparatus.
Such issues offer a severe safety concern to individuals who
deploy deadly robotic gadgets as well as unwitting bystanders.
Even if there are no possible problems, restrictions in
program ming may result in potentially disastrous errors.
Programming robots to discriminate between combatants and
noncombatants, for example, is a big challenge, and it's simple to envisage
misidentification leading to unintentional fatalities.
The greatest concern, though, is that robotic AI may grow
too quickly and become independent of human control.
Sentient robots might turn their armament on humans, like in
popular science fiction movies and literature, and in fulfillment of eminent
scientist Stephen Hawking's grim forecast that the development of AI could end
in humanity's annihilation.
Laws may also lead to major legal issues.
The rules of war apply to human beings.
Robots cannot be held accountable for prospective law
crimes, whether criminally, civilly, or in any other manner.
As a result, there's a chance that war crimes or other legal
violations may go unpunished.
Here are some serious issues to consider: Can the programmer
or engineer of a robot be held liable for the machine's actions? Could a person
who gave the robot its "command" be held liable for the robot's
unpredictability or blunders on a mission that was otherwise self-directed?
Such considerations must be thoroughly considered before any completely
autonomous deadly equipment is deployed.
Aside from legal issues of duty, a slew of ethical issues
must be addressed.
The conduct of war necessitates split-second moral
judgments.
Will self-driving robots be able to tell the difference between
a kid and a soldier, or between a wounded and helpless soldier and an active
combatant? Will a robotic military force always be seen as a cold, brutal, and
merciless army of destruction, or can a robot be designed to behave kindly when
the situation demands it? Because combat is riddled with moral dilemmas, LAWs
involved in war will always be confronted with them.
Experts wonder that dangerous autonomous robots can ever be
trusted to do the right thing.
Moral action requires not just rationality—which robots may
be capable of—but also emotions, empathy, and wisdom.
These later items are much more difficult to implement in
code.
Many individuals have called for an absolute ban on research
in this field because to legal, ethical, and practical problems highlighted by
the potential of ever more powerful AI-powered robotic military hardware.
Others, on the other hand, believe that scientific
advancement cannot be halted.
Rather than prohibiting such study, they argue that
scientists and society as a whole should seek realistic answers to the
difficulties.
Some argue that keeping continual human supervision and
control over robotic military units may address many of the ethical and legal
issues.
Others argue that direct supervision is unlikely in the long
term because human intellect will be unable to match the pace with which
computers think and act.
As the side that gives its robotic troops more autonomy
gains an overwhelming advantage over those who strive to preserve human
control, there will be an inevitable trend toward more and more autonomy.
They warn that fully autonomous forces will always triumph.
Despite the fact that it is still in its early stages, the
introduction of more complex AI and robotic equipment to the battlefield has
already resulted in significant change.
AI and robotics on the battlefield have the potential to
drastically transform the future of warfare.
It remains to be seen if and how this technology's
technical, practical, legal, and ethical limits can be addressed.
~ Jai Krishna Ponnappan
You may also want to read more about Artificial Intelligence here.