
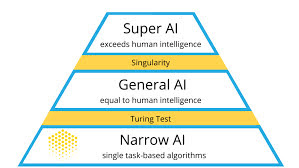
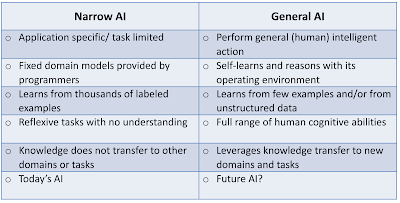
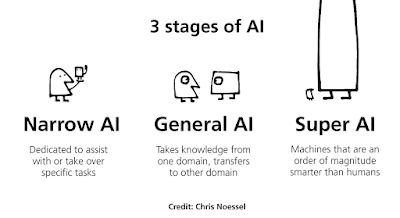
There are two types
of artificial intelligence: general (or powerful or complete) and narrow (or
limited) (or weak or specialized).
In the actual world, general AI, such as that seen in
science fiction, does not yet exist.
Machines with global intelligence would be capable of
completing every intellectual endeavor that humans are capable of.
This sort of system would also seem to think in abstract
terms, establish connections, and communicate innovative ideas in the same
manner that people do, displaying the ability to think abstractly and solve
problems.

Such a computer would be capable of thinking, planning, and
recalling information from the past.
While the aim of general AI has yet to be achieved, there
are more and more instances of narrow AI.
These are machines that perform at human (or even
superhuman) levels on certain tasks.
Computers that have learnt to play complicated games have
abilities, techniques, and behaviors that are comparable to, if not superior
to, those of the most skilled human players.
AI systems that can translate between languages in real
time, interpret and respond to natural speech (both spoken and written), and
recognize images have also been developed (being able to recognize, identify,
and sort photos or images based on the content).
However, the ability to generalize knowledge or skills is
still largely a human accomplishment.
Nonetheless, there is a lot of work being done in the field
of general AI right now.
It will be difficult to determine when a computer develops
human-level intelligence.
Several serious and hilarious tests have been suggested to
determine whether a computer has reached the level of General AI.
The Turing Test is arguably the most renowned of these
examinations.
A machine and a person speak in the background, as another
human listens in.
The human eavesdropper must figure out which speaker is a
machine and which is a human.
The machine passes the test if it can fool the human
evaluator a prescribed percentage of the time.
The Coffee Test is a more fantastical test in which a
machine enters a typical household and brews coffee.
It has to find the coffee machine, look for the coffee, add
water, boil the coffee, and pour it into a cup.
Another is the Flat Pack Furniture Test, which involves a machine
receiving, unpacking, and assembling a piece of furniture based only on the
instructions supplied.
Some scientists, as well as many science fiction writers and
fans, believe that once intelligent machines reach a tipping point, they will
be able to improve exponentially.
AI-based beings that far exceed human capabilities might be
one conceivable result.
The Singularity, or artificial superintelligence, is the
point at which AI assumes control of its own self-improvement (ASI).
If ASI is achieved, it will have unforeseeable consequences
for human society.
Some pundits worry that ASI would jeopardize humanity's
safety and dignity.
It's up for dispute whether the Singularity will ever
happen, and how dangerous it may be.
Narrow AI applications are becoming more popular across the
globe.
Machine learning (ML) is at the heart of most new
applications, and most AI examples in the news are connected to this subset of
technology.
Traditional or conventional algorithms are not the same as
machine learning programs.
In programs that cannot learn, a computer programmer
actively adds code to account for every action of an algorithm.
All of the decisions made along the process are governed by
the programmer's guidelines.
This necessitates the programmer imagining and coding for
every possible circumstance that an algorithm may face.
This kind of program code is bulky and often inadequate,
especially if it is updated frequently to accommodate for new or unanticipated
scenarios.
The utility of hard-coded algorithms approaches its limit in
cases where the criteria for optimum judgments are unclear or impossible for a
human programmer to foresee.
Machine learning is the process of training a computer to
detect and identify patterns via examples rather than predefined rules.
This is achieved, according to Google engineer Jason Mayes,
by reviewing incredibly huge quantities of training data or participating in
some other kind of programmed learning step.
New patterns may be extracted by processing the test data.
The system may then classify newly unknown data based on the
patterns it has already found.
Machine learning allows an algorithm to recognize patterns
or rules underlying decision-making processes on its own.
Machine learning also allows a system's output to improve
over time as it gains more experience (Mayes 2017).
A human programmer continues to play a vital role in this
learning process, influencing results by making choices like developing the
exact learning algorithm, selecting the training data, and choosing other
design elements and settings.
Machine learning is powerful once it's up and running
because it can adapt and enhance its ability to categorize new data without the
need for direct human interaction.
In other words, the output quality increases as the user
gains experience.
Artificial intelligence is a broad word that refers to the
science of making computers intelligent.
AI is a computer system that can collect data and utilize it
to make judgments or solve issues, according to scientists.
Another popular scientific definition of AI is "a
software program paired with hardware that can receive (or sense) inputs from
the world around it, evaluate and analyze those inputs, and create outputs and
suggestions without the assistance of a person." When programmers claim an
AI system can learn, they're referring to the program's ability to change its
own processes in order to provide more accurate outputs or predictions.
AI-based systems are now being developed and used in
practically every industry, from agriculture to space exploration, and in
applications ranging from law enforcement to online banking.
The methods and techniques used in computer science are
always evolving, extending, and improving.
Other terminology linked to machine learning, such as
reinforcement learning and neural networks, are important components of
cutting-edge artificial intelligence systems.
You may also want to read more about Artificial Intelligence here.
See also:
Embodiment, AI and; Superintelligence; Turing, Alan; Turing Test.
Further Reading:
Kelnar, David. 2016. “The Fourth Industrial Revolution: A Primer on Artificial Intelligence (AI).” Medium, December 2, 2016. https://medium.com/mmc-writes/the-fourth-industrial-revolution-a-primer-on-artificial-intelligence-ai-ff5e7fffcae1.
Kurzweil, Ray. 2005. The Singularity Is Near: When Humans Transcend Biology. New York: Viking.
Mayes, Jason. 2017. Machine Learning 101. https://docs.google.com/presentation/d/1kSuQyW5DTnkVaZEjGYCkfOxvzCqGEFzWBy4e9Uedd9k/htmlpresent.
Müller, Vincent C., and Nick Bostrom. 2016. “Future Progress in Artificial Intelligence: A Survey of Expert Opinion.” In Fundamental Issues of Artificial Intelligence, edited by Vincent C. Müller, 553–71. New York: Springer.
Russell, Stuart, and Peter Norvig. 2003. Artificial Intelligence: A Modern Approach. Englewood Cliffs, NJ: Prentice Hall.
Samuel, Arthur L. 1988. “Some Studies in Machine Learning Using the Game of Checkers I.” In Computer Games I, 335–65. New York: Springer.






