Demis Hassabis lives in the United Kingdom and works as a
computer game programmer, cognitive scientist, and artificial intelligence
specialist.
He is a cofounder of DeepMind, the company that created the
AlphaGo deep learning engine.
Hassabis is well-known for being a skilled game player.
His passion for video games paved the way for his career as
an artificial intelligence researcher and computer game entrepreneur.
Hassabis' parents noticed his chess prowess at a young age.
At the age of thirteen, he had achieved the status of chess
master.
He's also a World Team Champion in the strategic board game
Diplomacy, a World Series of Poker Main Event participant, and numerous World
Pentamind and World Deca mentathlon Champions in the London Mind Sports Olympiad.
Hassabis began working at Bullfrog Games in Guildford,
England, with renowned game designer Peter Molyneux when he was seventeen years
old.
Bullfrog was notable for creating a variety of popular
computer "god games." A god game is a computer-generated life
simulation in which the user has power and influence over semiautonomous people
in a diverse world.
Molyneux's Populous, published in 1989, is generally
regarded as the first god game.
Has sabis co-designed and coded Theme Park, a simulation management
game published by Bullfrog in 1994.
Hassabis dropped out of Bullfrog Games to pursue a degree at
Queens' College, Cambridge.
In 1997, he earned a bachelor's degree in computer science.
Following graduation, Hassabis rejoined Molyneux at Lionhead
Studios, a new gaming studio.
Hassabis worked on the artificial intelligence for the game
Black & White, another god game in which the user reigned over a virtual
island inhabited by different tribes, for a short time.
Hassabis departed Lionhead after a year to launch his own
video game studio, Elixir Studios.
Hassabis has signed arrangements with major publishers such
as Microsoft and Vivendi Universal.
Before closing in 2005, Elixir created a variety of games,
including the diplomatic strategy simulation game Republic: The Revolution and
the real-time strategy game Evil Genius.
Republic's artificial intelligence is modeled after Elias
Canetti's 1960 book People and Authority, which explores problems concerning
how and why crowds follow rulers' power (which Hassabis boiled down to force,
money, and influence).
Republic required the daily programming efforts of
twenty-five programmers over the course of four years.
Hassabis thought that the AI in the game would be valuable
to academics.
Hassabis took a break from game creation to pursue
additional studies at University College London (UCL).
In 2009, he received his PhD in Cognitive Neuroscience.
In his research of individuals with hippocampal injury,
Hassabis revealed links between memory loss and poor imagination.
These findings revealed that the brain's memory systems may
splice together recalled fragments of previous experiences to imagine
hypothetical futures.
Hassabis continued his academic studies at the Gatsby
Computational Neuroscience Unit at UCL and as a Wellcome Trust fellow for
another two years.
He was also a visiting researcher at MIT and Harvard
University.
Hassabis' cognitive science study influenced subsequent work
on unsupervised learning, memory and one-shot learning, and imagination-based
planning utilizing generic models in artificial intelligence.
With Shane Legg and Mustafa Suleyman, Hassabis cofounded the
London-based AI start-up DeepMind Technologies in 2011.
The organization was focused on interdisciplinary science,
bringing together premier academics and concepts from machine learning,
neurology, engineering, and mathematics.
The mission of DeepMind was to create scientific
breakthroughs in artificial intelligence and develop new artificial
general-purpose learning capabilities.
Hassabis has compared the project to the Apollo Program for
AI.
DeepMind was tasked with developing a computer capable of
defeating human opponents in the abstract strategic board game Go.
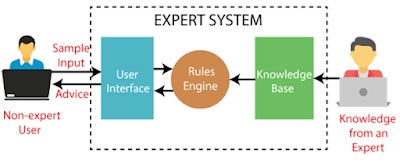
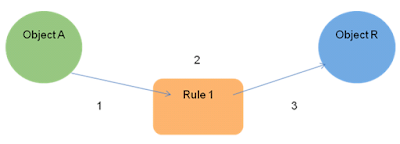
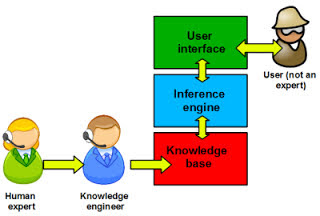
Hassabis didn't want to build an expert system, a
brute-force computer preprogrammed with Go-specific algorithms and heuristics.
Rather than the chess-playing single-purpose Deep Blue
system, he intended to construct a computer that adapted to play ing games in
ways comparable to human chess champ Garry Kasparov.
He sought to build a machine that could learn to deal with
new issues and have universality, which he defined as the ability to do a
variety of jobs.
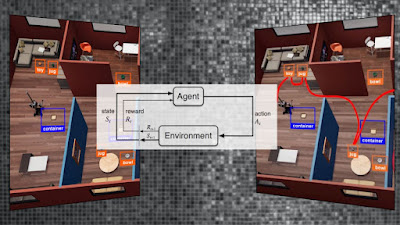
The reinforcement learning architecture was used by the
company's AlphaGo artificial intelligence agent, which was built to compete
against Lee Sedol, an eighteen-time world champion Go player.
Agents in the environment (in this example, the Go board)
aim to attain a certain objective via reinforcement learning (winning the
game).
The agents have perceptual inputs (such as visual input) as
well as a statistical model based on environmental data.
The agent creates plans and goes through simulations of
actions that will modify the model in order to accomplish the objective while
collecting perceptual input and developing a representation of its
surroundings.
The agent is always attempting to choose behaviors that will
get it closer to its goal.
Hassabis argues that resolving all of the issues of
goal-oriented agents in a reinforcement learning framework would be adequate to
fulfill artificial general intelligence's promise.
He claims that biological systems work in a similar manner.
The dopamine system in human brains is responsible for implementing
a reinforcement learning framework.
To master the game of Go, it usually takes a lifetime of
study and practice.
Go includes a significantly broader search area than chess.
On the board, there are more potential Go locations than
there are atoms in the cosmos.
It is also thought to be almost hard to develop an
evaluation function that covers a significant portion of those places in order
to determine where the next stone should be placed on the board.
Each game is essentially unique, and exceptional players
describe their decisions as being guided by intuition rather than logic.
AlphaGo addressed these obstacles by leveraging data
gathered from thousands of strong amateur games played by human Go players to
train a neural network.
After that, AlphaGo played millions of games against itself,
predicting how probable each side was to win based on the present board
positions.
No specific assessment standards were required in this
manner.
In Seoul, South Korea, in 2006, AlphaGo beat Go champion Lee
Sedol (four games to one).
The way AlphaGo plays is considered cautious.
It favors diagonal stone placements known as "shoulder
hits" to enhance victory while avoiding risk or point spread—thus putting
less apparent focus on achieving territorial gains on the board.
In order to play any two-person game, AlphaGo has
subsequently been renamed AlphaZero.
Without any human training data or sample games, AlphaZero
learns from begin.
It only learns from random play.
After just four hours of training, AlphaZero destroyed Stock
fish, one of the best free and open-source chess engines (28 games to 0 with 72
draws).
AlphaZero prefers the mobility of the pieces above their
materiality while playing chess, which results in a creative style of play
(similar to Go).
Another task the business took on was to develop a
versatile, adaptable, and durable AI that could teach itself how to play more
than 50 Atari video games just by looking at the pixels and scores on a video
screen.
Hassabis introduced deep reinforcement learning, which
combines reinforcement learning and deep learning, for this difficulty.
To create a neural network capable of reliable perceptual
identification, deep neural networks need an input layer of observations,
weighting mechanisms, and backpropagation.
In the instance of the Atari challenge, the network was
trained using the 20,000-pixel values that flashed on the videogame screen at
any given time.
Under deep learning, reinforcement learning takes the
machine from the point where it perceives and recognizes a given input to the
point where it can take meaningful action toward a goal.
In the Atari challenge, the computer learnt how to win over
hundreds of hours of playtime by doing eighteen distinct exact joystick actions
in a certain time-step.
To put it another way, a deep reinforcement learning machine
is an end-to-end learning system capable of analyzing perceptual inputs,
devising a strategy, and executing the strategy from start.
DeepMind was purchased by Google in 2014.
Hassabis continues to work at Google with DeepMind's deep
learning technology.
Optical coherence tomography scans for eye disorders are
used in one of these attempts.
By triaging patients and proposing how they should be referred
for further treatment, DeepMind's AI system can swiftly and reliably diagnose
from eye scans.
AlphaFold is a machine learning, physics, and structural
biology system that predicts three-dimensional protein structures simply based
on its genetic sequence.
AlphaFold took first place in the 2018 "world
championship" for Critical Assessment of Techniques for Protein Structure
Prediction, successfully predicting the most accurate structure for 25 of 43
proteins.
AlphaStar is currently mastering the real-time strategy game
StarCraft II.
You may also want to read more about Artificial Intelligence here.
See also:
Deep Learning.
Further Reading:
“Demis Hassabis, Ph.D.: Pioneer of Artificial Intelligence.” 2018. Biography and interview. American Academy of Achievement. https://www.achievement.org/achiever/demis-hassabis-ph-d/.
Ford, Martin. 2018. Architects of Intelligence: The Truth about AI from the People Building It. Birmingham, UK: Packt Publishing Limited.
Gibney, Elizabeth. 2015. “DeepMind Algorithm Beats People at Classic Video Games.” Nature 518 (February 26): 465–66.
Gibney, Elizabeth. 2016. “Google AI Algorithm Masters Ancient Game of Go.” Nature 529 (January 27): 445–46.
Proudfoot, Kevin, Josh Rosen, Gary Krieg, and Greg Kohs. 2017. AlphaGo. Roco Films.