What Is ARTMAP AI Algorithm?
The supervised learning variant of the ART-1 model is ARTMAP.
It learns binary
input patterns that are given to it.
The suffix "MAP" is used in the names of numerous supervised ART algorithms, such as Fuzzy ARTMAP.
Both the inputs and the targets are clustered in these
algorithms, and the two sets of clusters are linked.
The ARTMAP algorithms' fundamental flaw is that they lack a way to prevent overfitting, hence they should not be utilized with noisy data.
How Does The ARTMAP Neural Network Work?
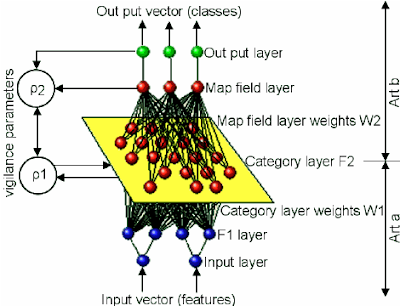
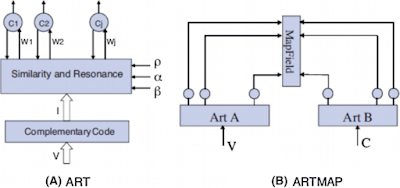
A novel neural network architecture called ARTMAP automatically picks out recognition categories for any numbers of arbitrarily ordered vectors depending on the accuracy of predictions.
A pair of Adaptive Resonance Theory modules (ARTa and ARTb) that may self-organize stable recognition categories in response to random input pattern sequences make up this supervised learning system.
The ARTa module gets a stream of input patterns ([a(p)]) and the ARTb module receives a stream of input patterns ([b(p)]), where b(p) is the right prediction given a (p).
An internal controller and an associative learning network connect these ART components to provide real-time autonomous system functioning.
The remaining patterns a(p) are shown during test trials without b(p), and their predictions at ARTb are contrasted with b. (p).
The ARTMAP system learns orders of magnitude more quickly, efficiently, and accurately than alternative algorithms when tested on a benchmark machine learning database in both on-line and off-line simulations, and achieves 100% accuracy after training on less than half the input patterns in the database.
It accomplishes these features by using an internal controller that, on a trial-by-trial basis, links predictive success to category size and simultaneously optimizes predictive generalization and reduces predictive error, using only local operations.
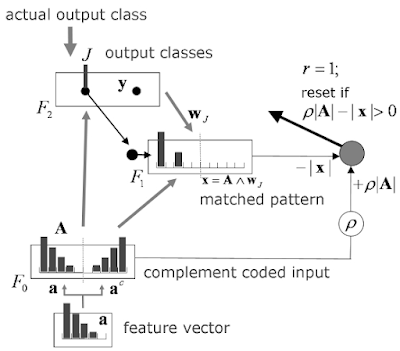
By the smallest amount required to rectify a predicted inaccuracy at ARTb, this calculation raises the alertness parameter an of ARTa.
To accept a category or hypothesis triggered by an input a(p), rather than seeking a better one via an autonomously controlled process of hypothesis testing, ARTa must have a minimal level of confidence, which is calibrated by the parameter a.
The degree of agreement between parameter a and the top-down learnt expectation, or prototype, which is read out after activating an ARTa category, is compared.
If the degree of match is less than a, search is initiated.
The self-organizing expert system known as ARTMAP adjusts the selectivity of its hypotheses depending on the accuracy of its predictions.
As a result, even if they are identical to frequent occurrences with distinct outcomes, unusual but significant events may be promptly and clearly differentiated.
In the intervals between input trials, a returns to baseline alertness.
When is big, the system operates in a cautious mode and only makes predictions when it is certain of the result.
At no step of learning, therefore, do many false-alarm mistakes happen, yet the system nonetheless achieves asymptote quickly.
Due to the self-stabilizing nature of ARTMAP learning, it may continue to learn one or more databases without deteriorating its corpus of memories until all available memory has been used.
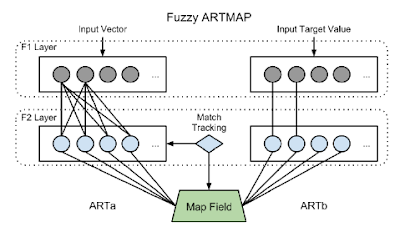
What Is Fuzzy ARTMAP?

For incremental supervised learning of recognition categories and multidimensional maps in response to arbitrary sequences of analogue or binary input vectors, which may represent fuzzily or crisply defined sets of characteristics, a neural network architecture is developed.
By taking advantage of a close formal resemblance between the computations of fuzzy subsethood and ART category choosing, resonance, and learning, the architecture, dubbed fuzzy ARTMAP, accomplishes a synthesis of fuzzy logic and adaptive resonance theory (ART) neural networks.
In comparison to benchmark backpropagation and general algorithm systems, fuzzy ARTMAP performance was shown using four simulation classes.
A letter recognition database, learning to distinguish between two spirals, identifying locations inside and outside of a circle, and incremental approximation of a piecewise-continuous function are some of the simulations included in this list.
Additionally, the fuzzy ARTMAP system is contrasted with Simpson's FMMC system and Salzberg's NGE systems.
Find Jai on Twitter | LinkedIn | Instagram
Be sure to refer to the complete & active AI Terms Glossary here.
You may also want to read more about Artificial Intelligence here.
References And Further Reading:
- Moreira-Júnior, J.R., Abreu, T., Minussi, C.R. and Lopes, M.L., 2022. Using Aggregated Electrical Loads for the Multinodal Load Forecasting. Journal of Control, Automation and Electrical Systems, pp.1-9.
- Ferreira, W.D.A.P., Grout, I. and da Silva, A.C.R., 2022, March. Application of a Fuzzy ARTMAP Neural Network for Indoor Air Quality Prediction. In 2022 International Electrical Engineering Congress (iEECON) (pp. 1-4). IEEE.
- La Marca, A.F., Lopes, R.D.S., Lotufo, A.D.P., Bartholomeu, D.C. and Minussi, C.R., 2022. BepFAMN: A Method for Linear B-Cell Epitope Predictions Based on Fuzzy-ARTMAP Artificial Neural Network. Sensors, 22(11), p.4027.
- Santos-Junior, C.R., Abreu, T., Lopes, M.L. and Lotufo, A.D., 2021. A new approach to online training for the Fuzzy ARTMAP artificial neural network. Applied Soft Computing, 113, p.107936.
- Ferreira, W.D.A.P., 2021. Rede neural ARTMAP fuzzy implementada em hardware aplicada na previsão da qualidade do ar em ambiente interno.