Projects to develop
the infrastructure for smart cities and houses are involving public
authorities, professionals, businessmen, and residents all around the world.
These smart cities and houses make use of information and
communication technology (ICT) to enhance quality of life, local and regional
economies, urban planning and transportation, and government.
Urban informatics is a new area that gathers data, analyzes
patterns and trends, and utilizes the information to implement new ICT in smart
cities.
Data may be gathered from a number of different sources.
Surveillance cameras, smart cards, internet of things sensor
networks, smart phones, RFID tags, and smart meters are just a few examples.
In real time, any kind of data may be captured.
Passenger occupancy and flow may be used to obtain data on
mass transit utilization.
Road sensors can count cars on the road or in parking lots.
They may also use urban machine vision technologies to
determine individual wait times for local government services.
From public thoroughfares and sidewalks, license plate
numbers and people's faces may be identified and documented.
Tickets may be issued, and statistics on crime can be
gathered.
The information gathered in this manner may be compared to
other big datasets on neighborhood income, racial and ethnic mix, utility
reliability statistics, and air and water quality indices.
Artificial intelligence (AI) may be used to build or improve
city infrastructure.

Stop signal frequencies at crossings are adjusted and
optimized based on data acquired regarding traffic movements.
This is known as intelligent traffic signaling, and it has
been found to cut travel and wait times, as well as fuel consumption,
significantly.
Smart parking structures assist cars in quickly locating
available parking spaces.
Law enforcement is using license plate identification and
face recognition technologies to locate suspects and witnesses at crime scenes.
Shotspotter, a business that triangulates the position of
gunshots using a sensor network placed in special streetlights, tracked and
informed police agencies to over 75,000 bullets fired in 2018.
Information on traffic and pedestrian deaths is also being
mined via big data initiatives.
Vision Zero is a global highway safety initiative that
aspires to decrease road fatalities to zero.
Data analysis using algorithms has resulted in road safety
efforts as well as road redesign that has saved lives.
Cities have also been able to respond more swiftly to severe
weather occurrences because to ubiquitous sensor technology.
In Seattle, for example, conventional radar data is combined
with RainWatch, a network of rain gauges.
Residents get warnings from the system, and maintenance
staff are alerted to possible problem places.
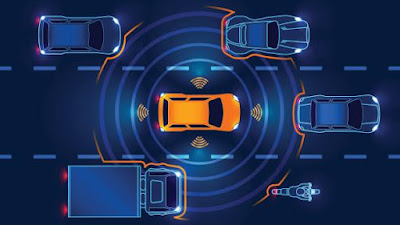
Transport interconnection enabling completely autonomous
autos is one long-term aim for smart cities.
At best, today's autonomous cars can monitor their
surroundings to make judgments and avoid crashes with other vehicles and
numerous road hazards.
However, cars that connect with one another in several
directions are likely to create fully autonomous driving systems.
Collisions are not only averted, but also prevented in these
systems.
Smart cities are often mentioned in conjunction with smart
economy initiatives and foreign investment development by planners.
Data-driven entrepreneurial innovation, as well as
productivity analyses and evaluation, might be indicators of sensible economic
initiatives.
Some smart towns want to emulate Silicon Valley's success.
Neom, Saudi Arabia, is one such project.
It is a proposed megacity city that is expected to cost half
a trillion dollars to build.
Artificial intelligence is seen as the new oil in the city's
ambitions, despite sponsorship by Saudi Aramco, the state-owned petroleum
giant.
Everything will be controlled by interconnected computer
equipment and future artificial intelligence decision-making, from home
technology to transportation networks and electronic medical record
distribution.
One of Saudi Arabia's most significant cultural
activities—monitoring the density and pace of pilgrims around the Kaaba in
Mecca—has already been entrusted to AI vision technologies.
The AI is intended to avert a disaster on the scale of the
2015 Mina Stampede, which claimed the lives of 2,000 pilgrims.
The use of highly data-driven and targeted public services
is another trademark of smart city programs.
Information-driven agencies are frequently referred to as
"smart" or "e-government" when they work together.
Open data projects to encourage openness and shared
engagement in local decision-making might be part of smart governance.
Local governments will collaborate with contractors to
develop smart utility networks for the provision of electricity,
telecommunications, and the internet.
Waste bins are linked to the global positioning system and
cloud servers, alerting vehicles when garbage is ready for pickup, allowing for
smart waste management and recycling initiatives in Barcelona.
Lamp poles have been converted into community wi-fi hotspots
or mesh networks in certain areas to provide pedestrians with dynamic lighting
safety.
Forest City in Malaysia, Eko Atlantic in Nigeria, Hope City
in Ghana, Kigamboni New City in Tanzania, and Diamniadio Lake City in Senegal
are among the high-tech centres proposed or under development.
Artificial intelligence is predicted to be the brain of the
smart city in the future.
Artificial intelligence will personalize city experiences to
match the demands of specific inhabitants or tourists.
Through customized glasses or heads-up displays, augmented
systems may give virtual signs or navigational information.
Based on previous use and location data, intelligent smartphone
agents are already capable of predicting user movements.
Artificial intelligence technologies are used in smart homes
in a similar way.
Google Home and other smart hubs now integrate with over
5,000 different types of smart gadgets sold by 400 firms to create intelligent
environments in people's homes.
Amazon Echo is Google Home's main rival.
These kinds of technologies can regulate heating,
ventilation, and air conditioning, as well as lighting and security, as well as
household products like smart pet feeders.
In the early 2000s, game-changing developments in home
robotics led to widespread consumer acceptance of iRobot's Roomba vacuum
cleaner.
Obsolescence, proprietary protocols, fragmented platforms
and interoperability issues, and unequal technological standards have all
plagued such systems in the past.
Machine learning is being pushed forward by smart houses.
Smart technology' analytical and predictive capabilities are
generally regarded as the backbone of one of the most rapidly developing and
disruptive commercial sectors: home automation.
To function properly, the smarter connected home of the
future needs collect fresh data on a regular basis in order to develop.
Smart houses continually monitor the interior environment
and use aggregated past data to establish settings and functionalities in
buildings with smart components installed.
Smart houses may one day anticipate their owners'
requirements, such as automatically changing blinds as the sun and clouds move
across the sky.
A smart house may produce a cup of coffee at precisely the
correct time, order Chinese takeout, or play music based on the resident's mood
as detected by emotion detectors.
Pervasive, sophisticated technologies are used in smart city
and household AI systems.
The benefits of smart cities are many.
Smart cities pique people's curiosity because of its promise
for increased efficiency and convenience.
It's enticing to live in a city that anticipates and easily
fulfills personal wants.
Smart cities, however, are not without their detractors.
Smart havens, if left uncontrolled, have the ability to
cause major privacy invasion via continuous video recording and microphones.
Google contractors might listen to recordings of exchanges
with users of its famous Google Assistant artificial intelligence system,
according to reports in 2019.
The influence of smart cities and households on the
environment is yet unknown.
Biodiversity considerations are often ignored in smart city
ideas.
Critical habitat is routinely destroyed in order to create
space for the new cities that tech entrepreneurs and government officials
desire.
Conventional fossil-fuel transportation methods continue to
reign supreme in smart cities.
The future viability of smart homes is likewise up in the
air.
A recent research in Finland found that improved metering
and consumption monitoring did not successfully cut smart home power use.
In reality, numerous smart cities that were built from the
ground up are now almost completely empty.
Many years after their initial construction, China's
so-called ghost cities, such as Ordos Kangbashi, have attained occupancy levels
of one-third of all housing units.
Despite direct, automated vacuum waste collection tubes in
individual apartments and building elevators timed to the arrival of residents'
automobiles, Songdo, Korea, an early "city in a box," has not lived
up to promises.
Smart cities are often portrayed as impersonal, elitist, and
costly, which is the polar opposite of what the creators intended.
Songdo exemplifies the smart city trend in many aspects,
with its underpinning structure of ubiquitous computing technologies that power
everything from transportation systems to social networking channels.
The unrivaled integration and synchronization of services is
made possible by the coordination of all devices.
As a result, by turning the city into an electronic
panopticon or surveillance state for observing and controlling residents, the
city simultaneously weakens the protective advantages of anonymity in public
settings.
Authorities studying smart city infrastructures are now
fully aware of the computational biases of proactive and predictive policing.
~ Jai Krishna Ponnappan
Find Jai on Twitter | LinkedIn | Instagram
You may also want to read more about Artificial Intelligence here.
See also:
Biometric Privacy and Security; Biometric Technology; Driverless Cars and Trucks; Intelligent Transportation; Smart Hotel Rooms.
References & Further Reading:
Albino, Vito, Umberto Berardi, and Rosa Maria Dangelico. 2015. “Smart Cities: Definitions, Dimensions, Performance, and Initiatives.” Journal of Urban Technology 22, no. 1: 3–21.
Batty, Michael, et al. 2012. “Smart Cities of the Future.” European Physical Journal Special Topics 214, no. 1: 481–518.
Friedman, Avi. 2018. Smart Homes and Communities. Mulgrave, Victoria, Australia: Images Publishing.
Miller, Michael. 2015. The Internet of Things: How Smart TVs, Smart Cars, Smart Homes, and Smart Cities Are Changing the World. Indianapolis: Que.
Shepard, Mark. 2011. Sentient City: Ubiquitous Computing, Architecture, and the Future of Urban Space. New York: Architectural League of New York.
Townsend, Antony. 2013. Smart Cities: Big Data, Civic Hackers, and the Quest for a New Utopia. New York: W. W. Norton & Company.